
Arduino R3 Basic Servo With Button Project
This is a simple project showing how to connect an inexpensive servo to the Arduino which is button enabled.
ref : https://www.youtube.com/watch?v=ksNbEuhO4fU
Wiring Diagram
- 1 x Arduino
- 1 x Servo
- 1 x LED 9Light Emitting Diode)
- 1 x Button
- 1 x 1K ohm Resistor (Button)
- 1 x 330 ohm Resistor (LED)
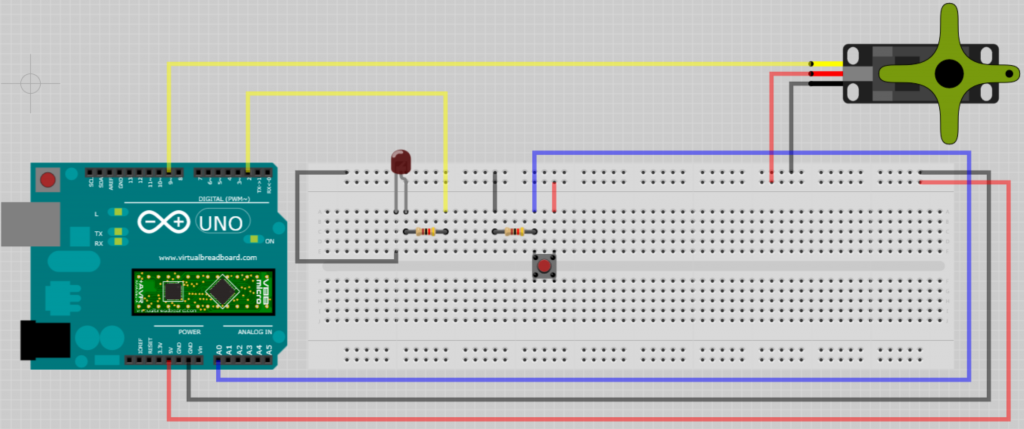
- Blue Wire – Analogue Wire to determine if the button has been pressed.
- Red Wires – 5 Volts Power Wires.
- Black Wires – Ground Wires.
- Yellow Wires – Digital Signal Wires.
Arduino Sketch
// Includes
#include <Servo.h> // include the servo library
// Constants
int baudRate = 115200; // set the baud rate value
// Pins
int buttonPin = A0; // set analog pin A0 as the button input pin
int ledPin = 2; // set pin 2 as the output pin for the LED
int servoPin = 9; // set pin 9 as the output pin for the servo
// Initialize Values
int buttonValue = 0; // set the initial value of the button to off
int iDelay = 25; // set the delay value
// Smoothing Variables
float switchScaled;
float switch1Smoothed;
float switch1Prev;
// Create Servo
Servo servo1; // create the servo object
void setup() {
Serial.begin(baudRate); // start the serial terminal / plotter
pinMode(ledPin, OUTPUT); // enable the LED output pin
pinMode(buttonPin, INPUT); // enable the Button input pin
servo1.attach(servoPin); // attach the servo to the pin
servo1.writeMicroseconds(1200); // define the servo listening time
}
void loop() {
buttonValue = digitalRead(buttonPin); // read the value of the button pin
if (buttonValue != 0) {
digitalWrite(ledPin, HIGH); // turn on the LED
}
else {
digitalWrite(ledPin, LOW); // turn off the LED
}
switchScaled = buttonValue * 100; // value = 0 result = 0 else value = 1 result = 100
switch1Smoothed = (switchScaled * 0.05) + (switch1Prev * 0.95); // smooth the value
switch1Prev = switch1Smoothed; // store the value for the next loop
Serial.print(switchScaled); // print to serial terminal/plotter
Serial.print(" , ");
Serial.println(switch1Smoothed);
servo1.writeMicroseconds(switch1Smoothed); // set the servo position
delay(iDelay);
}